The BOW SDK gives you the power to create fully functional robotics solutions. We take care of the complexity and plumbing work of robotics, leaving you to design the business logic.
You can create code using popular programming languages, test it in a simulated environment, then deploy to a real robot when you’re ready. You don’t need to commit to any particular robot because all robots supported by BOW are driven by the same code.
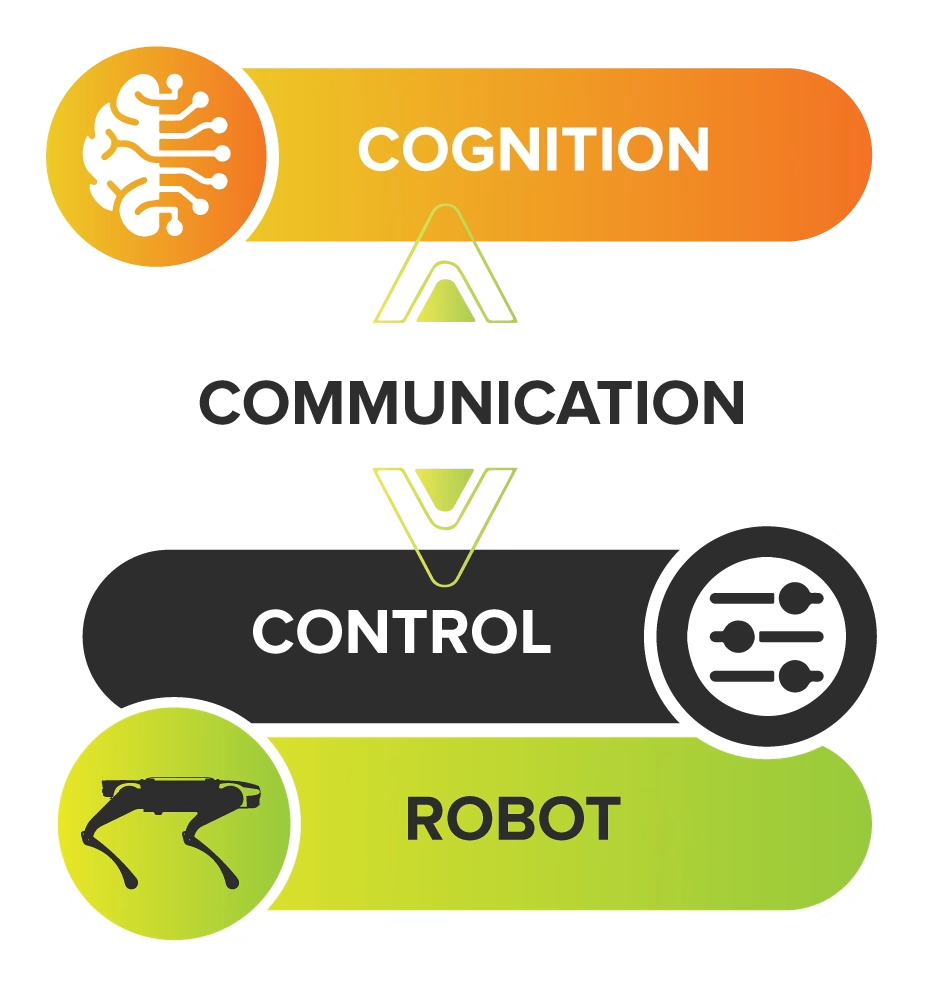
Cognition is fun, but control and communication are hard.
Manufacturers ship robots with bespoke, impenetrable APIs, which date quickly. Attempts at standardisation have failed by growing in complexity with the hardware. The result is roboticists reverse-engineer comms for each new robot from scratch.
Without BOW
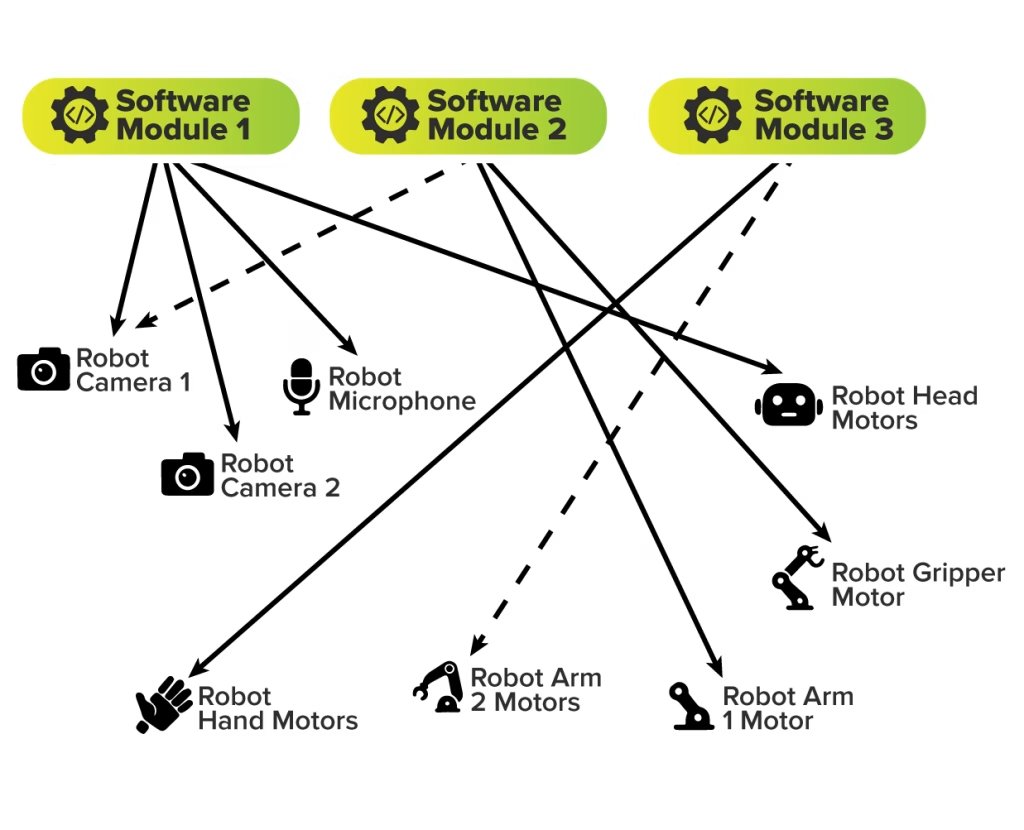
Software modules written in ROS reference ‘topics’ of information by name.
When those names change, software modules break. When the number of motors or sensors being addressed changes, these modules break.
When building software a developer has to figure out which one of the hundreds of robot hardware modules they need to connect to, what the topic names are, and check the data types being sent over those topics.
Some robots have hundreds of tiny modules making it very difficult to understand and find what you need.
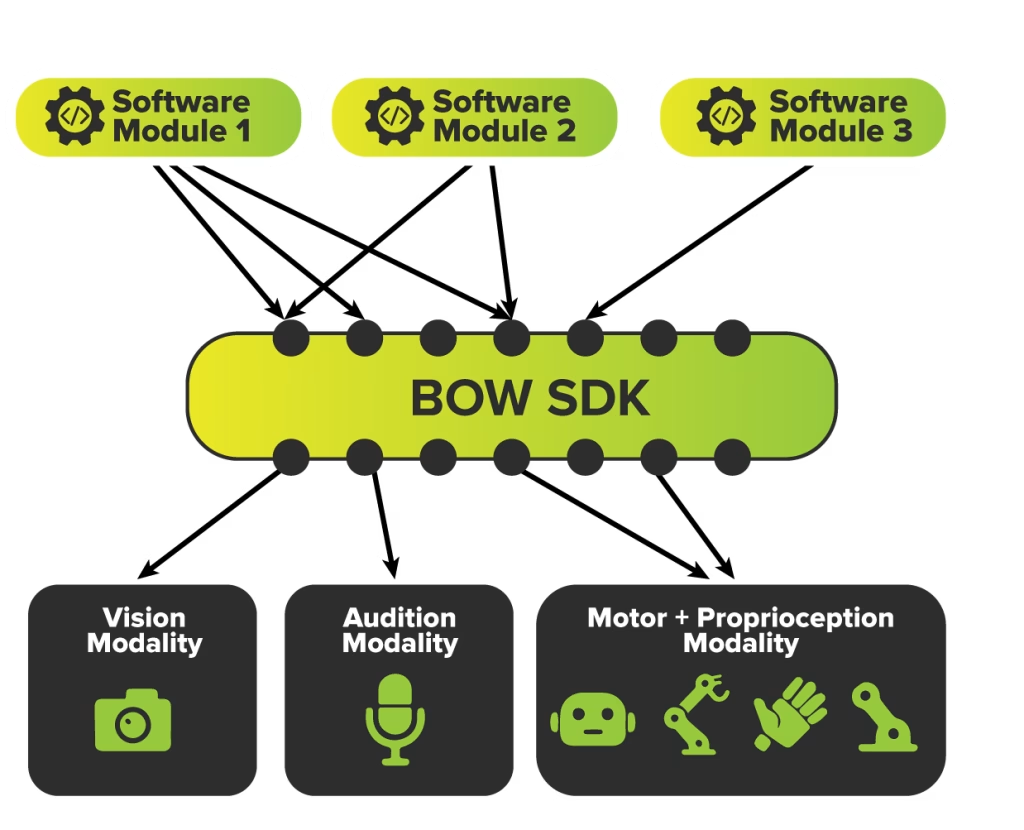
BOWs Approach
Software Modules access information from the BOW SDK.
The latest information per modality is cached in the BOW layer so information is only transmitted once between robot and software.
Software modules do not have to use the same communication protocol as the hardware being integrated – it can be ROS based or any other form of programming.
Hardware integration within each modality can be done with ROS, with other middleware, straight to device or a mix of the above.
Easily develop for any robot, on any OS, in any language
Our tech stack centralises all the control and communication and automates the process of building binaries for all operating systems
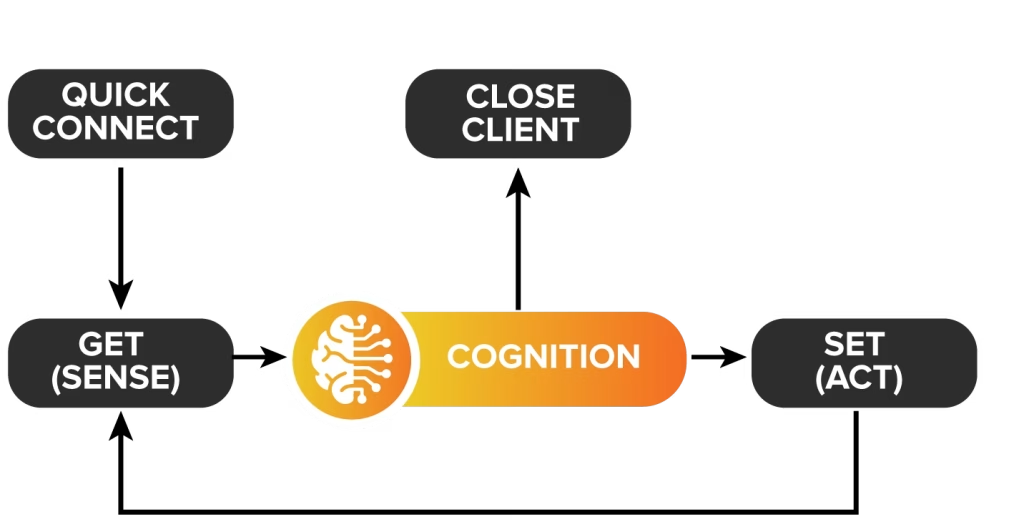
We provide all the functions in orange so that you can get started right away working on cognition instead of understanding how to access the inputs and outputs of the robot.
Multi-user access to single robots & simultaneous control of multiple robots
Online robot management system & access to community-developed apps as well as robot sharing capabilities
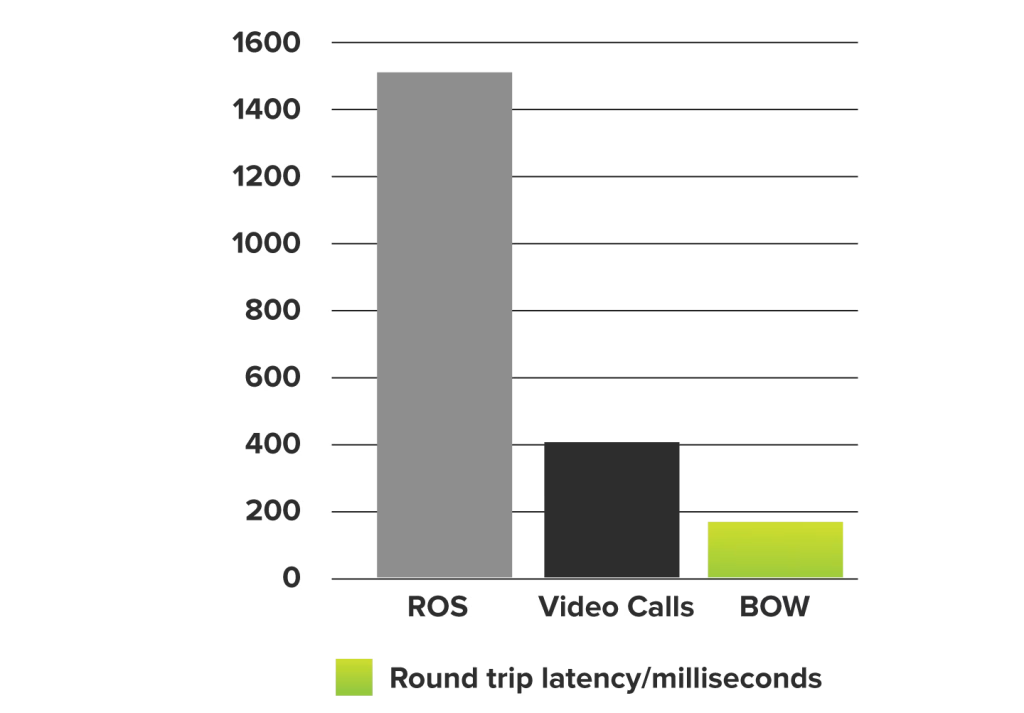
Low Latency
BOW’s communication uses a custom implementation of WebRTC heavily optimised specifically for our data structures. Our robot representation is bandwidth efficient requiring just 5Mbps of bandwidth for remote control across continents. Cross-continental round trip latency of control is less than 150m.